数字图像的距离变换算法
一、图像数字化
通过传感器获得的图像是平面坐标(x,y)的连续函数f(x,y),它的值图像对应位置的亮度。为了能够让计算机来处理,需要对图像进行采样,并且对亮度值进行量化。
1、采样。对连续函数f(x,y)进行采样,就是分别对x轴和y轴,按照固定间隔取值,得到平面坐标上的M×N个点,将其函数值作为元素生成M行N列的矩阵。
2、量化亮度值。将f(x,y)的值转化为等价的整数值的过程称为量化,量化的级别越高,图像越细致。通常将亮度值表示为0-255之间的整数。
这样,在计算机中通常以矩阵表示数字图像,矩阵的元素对应图像的亮度信息。
二、距离
满足以下三个条件的函数
D
DD称作距离:
(1)同一性:
D
(
p
,
q
)
≥
0
。
当
且
仅
当
p
=
q
时
,
D
(
p
,
q
)
=
0
。
D(p,q)\ge 0。 当且仅当p=q时,D(p,q)=0。D(p,q)≥0。当且仅当p=q时,D(p,q)=0。
(2)对称性: D ( p , q ) = D ( q , p ) 。 D(p,q)=D(q,p)。D(p,q)=D(q,p)。
(3)三角不等式: D ( p , r ) ≤ D ( p , q ) + D ( q , r ) 。 D(p,r)\le D(p,q)+D(q,r)。D(p,r)≤D(p,q)+D(q,r)。
数字图像的距离有多种定义方式,包括欧式距离、城市街区距离、棋盘距离等。以下以两坐标点 a = ( i , j ) a=(i,j)a=(i,j)和 b = ( k , l ) b=(k,l)b=(k,l)的距离为例,来说明各种距离的定义方式。
欧式距离
D
e
{D_e}De就是通常所说的距离,它定义为
D
e
(
a
,
b
)
=
(
(
i
−
k
)
2
)
+
(
j
−
l
)
2
D_e(a,b)=\sqrt{((i-k)^2)+(j-l)^2}De(a,b)=((i−k)2)+(j−l)2
欧式距离在事实上比较直观,但是平方根计算比较费时,且距离可能不是数。
城市街区距离
D
4
D_4D4,它定义为在只允许横向和纵向运动的情况下,从起点到终点的移动步数。用公式表示为
D
4
(
a
,
b
)
=
∣
i
−
k
∣
+
∣
j
−
l
∣
D_4(a,b)=|i-k|+|j-l|D4(a,b)=∣i−k∣+∣j−l∣
符号 D 4 D_4D4中的 4 44表示在这种定义下,像素点是 4 44邻接的,即每个点只与它的上、下、左、右相邻的 4 44个点之间的距离为 1 11。
如果允许横向、纵向和沿对角线方向移动,则可以得到棋盘距离
D
8
D_8D8的定义
D
8
(
a
,
b
)
=
m
a
x
{
∣
i
−
k
∣
,
∣
j
−
l
∣
}
D_8(a,b)=max\{|i-k|,|j-l|\}D8(a,b)=max{∣i−k∣,∣j−l∣}
符号 D 8 D_8D8中的 8 88表示在这种定义下,像素点是 8 88邻接的,即每个点只与它的上、下、左、右、四个对角线方向相邻的 8 88个点之间的距离为 1 11。
显然,以上三种距离的定义都满足距离的定义条件。
三、距离变换
距离变换也叫作距离函数或者斜切算法。它是距离概念的一个应用,图像处理的一些算法以距离变换为基础。距离变换描述的是图像中像素点与某个区域块的距离,区域块中的像素点值为0,临近区域块的像素点有较小的值,离它越远值越大。
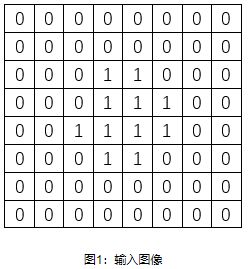
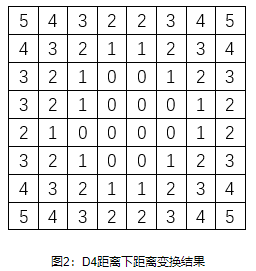
以二值图像为例,其中区域块内部的像素值为1,其他像素值为0。距离变换给出每个像素点到最近的区域块边界的距离,区域块内部的距离变换结果为0。输入图像如图1所示,D4距离的距离变换结果如图2所示。
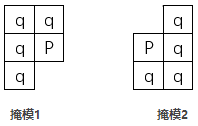
下面来讨论距离变换算法,其核心是利用两个小的局部掩膜遍历图像。第一遍利用掩模1,左上角开始,从左往右,从上往下。第二遍利用第二个掩模,右下角开始,从右往左,从下往上。掩模形状如下图所示:
按照某种距离(如: D 4 D_4D4距离或 D 8 D_8D8距离)对大小为 M × N M×NM×N的图像中的区域块作距离变换,算法过程如下:
1、建立一个大小为 M × N M×NM×N的数组 F FF,作如下的初始化:将区域块中的元素设置为 0 00,其余元素设置为无穷;
2、利用掩模1(mask1),左上角开始,从左往右,从上往下遍历数组,将掩模中P点对应的元素的值作如下更新:
F
(
P
)
=
m
i
n
q
∈
m
a
s
k
1
{
F
(
P
)
,
D
(
P
,
q
)
+
F
(
q
)
}
F(P)=\underset{{q\in mask1}}{min}\{F(P),D(P,q)+F(q)\}F(P)=q∈mask1min{F(P),D(P,q)+F(q)}
3、利用掩模2(mask2),右下角开始,从右往左,从下往上遍历数组,将掩模中P点对应的元素的值作如下更新:
F
(
P
)
=
m
i
n
q
∈
m
a
s
k
2
{
F
(
P
)
,
D
(
P
,
q
)
+
F
(
q
)
}
F(P)=\underset{{q\in mask2}}{min}\{F(P),D(P,q)+F(q)\}F(P)=q∈mask2min{F(P),D(P,q)+F(q)}
最终得到的更新后的数组即为距离变换的结果。
这个算法过程在图像编边界需要做出调整,因为在边界处,掩模不能全部覆盖图像,这时可以将掩模中没有对应元素的位置的值当作0来处理。
四、OpenCV代码实现
这个算法过程经过很多的改进,但基本原理并没有区别。开源计算机视觉库OpenCV中,距离变换算法有相应的实现,声明如下:
CV_EXPORTS_W void distanceTransform( InputArray src, OutputArray dst,
int distanceType, int maskSize, int dstType=CV_32F);参数详解:
- InputArray src:输入图像,一般为二值图像;
- OutputArray dst:输出的图像,距离变换结果;
- int distanceType:用于距离变换的距离类型(欧氏距离:DIST_L2 = 2; D 4 D_4D4距离:DIST_L1 = 1; D 8 D_8D8距离:DIST_C = 3等);
- int mask_size:距离变换掩模的大小,一般为3或5;
- int dstType:输出图像的数据类型,可以为CV_8U或CV_32F。
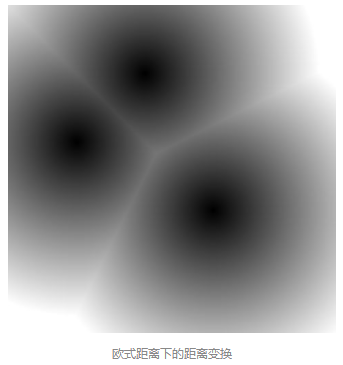
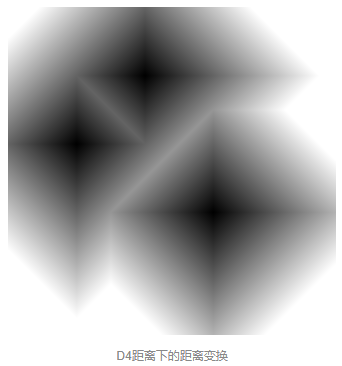
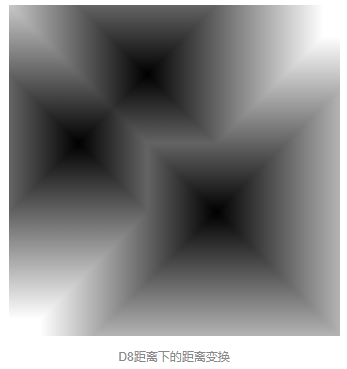
下面我们用一个具体的例子来展示距离变换的效果。将大小为 480 × 480 480\times480480×480,其中有三个像素点设置为1,其余都为0的一张图片作为输入图像,分别在欧式距离、 D 4 D_4D4距离和 D 8 D_8D8距离下,距离变换的结果。
效果如下图所示:
下面是代码实现:
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
//初始化输入图像和变换结果图像
Mat mat(480, 480, CV_8UC1, Scalar(0)), transMatE, transMatD4, transMatD8;
//给输入图像指定三个像素点作为距离变换原点(区域块)
mat.at<uchar>(100, 200) = 1;
mat.at<uchar>(200, 100) = 1;
mat.at<uchar>(300, 300) = 1;
//将将输入图像中1和0调换,使得原点距离为0
mat = 1 - mat;
//显示原始图像(显示为黑色)
imshow("原始图片", mat);
//分别利用欧式距离、D4距离和D8距离作距离变换,将结果存入transMatD4、transMatD8和transMatE
distanceTransform(mat, transMatE, DIST_L2, 0);
distanceTransform(mat, transMatD4, DIST_L1, 0, CV_8U);
distanceTransform(mat, transMatD8, DIST_C, 0);
//欧式距离与D8距离作变换后,值为32位浮点数,以下代码将其值转为uchar类型
transMatE.convertTo(transMatE, CV_8U);
transMatD8.convertTo(transMatD8, CV_8U);
//显示距离变换结果
imshow("欧式距离变换后的图片", transMatE);
imshow("D4距离变换后的图片", transMatD4);
imshow("D8距离变换后的图片", transMatD8);
waitKey();
return 0;